Quantization for LLM: A HW/SW Co-Design Perspective
( NOTE: For mobile users, please view this blog in landscape mode for better readibility. )
In this post, I will discuss quantization, an essential technique for efficient LLM deployment on hardware. My goal is to give an overview of LLM quantization from an algorithm/hardware co-design perspective. I will start from number representation, quantization basics, to advanced quantization techniques, as well as their hardware implications
I. Number Representation
In general, quantization aims to minimize the hardware memory usage to store numbers and the computational cost to process these numbers, while preserving model accuracy
I-1. Integer (INT)
Consider an \(\mathrm{N}\)-bit integer \(\mathrm{D_{N-1}\,{D_{N-2}\,\dots\,D_{0}}}\). Three commonly used integer representations are defined as follows:
-
Sign-Magnitude Representation, with decimal value:
\[(-1)^{\mathrm{D_{N-1}}} \,\cdot\, \left(\,\mathrm{D_{N-2}\,2^{N-2} + D_{N-3}\,2^{N-3} \,+\dots+ D_{0}\,2^{0}}\,\right)\] -
Two’s Complement Representation, with decimal value:
\[\mathrm{-D_{N-1}\,2^{N-1} + D_{N-2}\,2^{N-2} + D_{N-3}\,2^{N-3} \,+\dots+ D_{0}\,2^{0}}\] -
Unsigned Representation, with decimal value:
\[\mathrm{D_{N-1}\,2^{N-1} + D_{N-2}\,2^{N-2} + D_{N-3}\,2^{N-3} \,+\dots+ D_{0}\,2^{0}}\]
I-2. Floating-Point (FP)
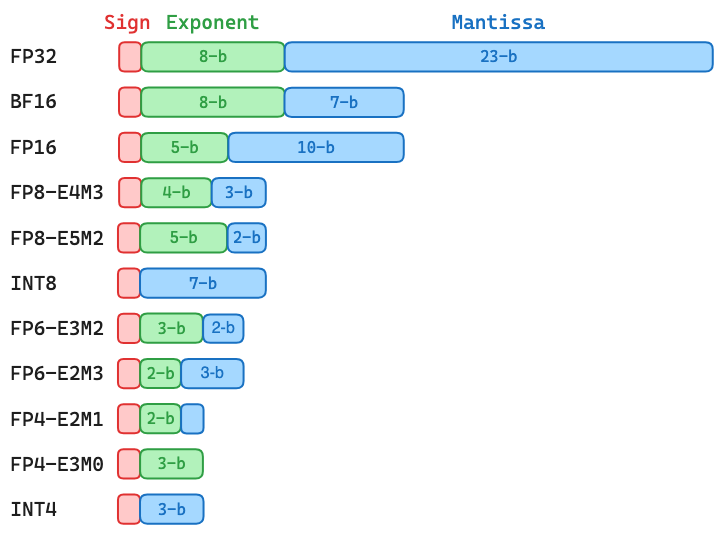
A floating-point representation is characterized by three components: Sign (S), Exponent (E), Mantissa (M). Since the sign always has a single bit, a floating-point representation with \(\mathrm{x}\)-bit exponent and \(\mathrm{y}\)-bit mantissa is often called \(\mathrm{\mathbf{ExMy}}\), which has the following binary pattern and decimal value:
\[\mathrm{S \; \underbrace{E_{x-1}\dots E_{0}}_{\text{Exponent}} \; \underbrace{M_{y-1}\dots M_{0}}_{\text{Mantissa}}} \,=\, \begin{cases} \,(-1)^{\,\mathrm{S}} \,\cdot\, \mathrm{2^{E-B} \,\cdot\, 1.{M}} & \text{if } \mathrm{E}\neq0 \\ \,(-1)^{\,\mathrm{S}} \,\cdot\, \mathrm{2^{1-B} \;\cdot\, 0.{M}} & \text{if } \mathrm{E}=0 \end{cases}\]where \(\mathrm{E}\) and \(\mathrm{M}\) are interpreted as unsigned integers, the constant \(\mathrm{B = {2^{\,x-1}-1}}\) is a fixed “bias” that allows the actual exponent to be both positive and negative. Note that there is a leading bit before \(\mathrm{M}\), which makes the actual mantissa equal to \(1.{\mathrm{M}}\) or \(0.\mathrm{M}\). This leading bit is often called the hidden bit as it does not need to be stored. Instead, it can be determined during runtime by checking whether the value is normal \((\mathrm{E} \neq 0)\) or subnormal \((\mathrm{E} = 0)\).
For LLM training and inference, the default number representations are the 32-bit IEEE floating-point format (FP32-E8M23) and the 16-bit brain floating-point format (BF16-E8M7). In practice, BF16-E8M7 is often used to store model weights and activations
I-3. Hardware for INT and FP Arithmetic
Given the importance of hardware efficiency for LLMs, it is useful to understand how a Multiply-Accumulate (MAC), the key operation in LLM training and inference, is carried out on hardware. Because a MAC consists of multiplication and addition, I will discuss the hardware implication of these two primitive operations under integer and floating-point representation.
Integer Addition and Multiplication
The simplest integer adder is Ripple-Carry Adder, whose area and delay complexities ore \(\mathrm{O(N)}\)
The simplest integer multiplier multiplies every bits of two multiplicands via logical AND operations, followed by reducing these binary products via adder chains. This leads to an area complexity of \(\mathrm{O(N^2)}\) for \(\mathrm{N}\)-bit integer multiplication. Modern integer multipliers employ more efficient architectures, such as Wallace Tree and Dadda Tree, for fast reduction of binary products.
Floating-Point Multiplication
The floating-point MAC is rather complicated as it needs to deal with exponent. To simply the discussion, I will only focus on normal floating-point numbers, whose binary exponent is larger than zero.
Consider two normal floating-point numbers \(\mathrm{F}_{1}\) and \(\mathrm{F}_{2}\,\):
\[\begin{aligned} \mathrm{F_1} \,&=\, (-1)^{\,\mathrm{S}_{1}} \,\cdot\, 2^{\mathrm{E}_{1}-\mathrm{B}} \,\cdot\, 1.\mathrm{M}_{1} \\ \mathrm{F_2} \,&=\, (-1)^{\,\mathrm{S}_{2}} \,\cdot\, 2^{\mathrm{E}_{2}-\mathrm{B}} \,\cdot\, 1.\mathrm{M}_{2} \end{aligned}\]The multiplication product is:
\[\mathrm{P} = \mathrm{F_1} \cdot \mathrm{F_2} \,=\, (-1)^{\mathrm{S}_{1\,} \oplus\, \mathrm{S}_{2}} \,\cdot\, 2^{\mathrm{E}_{1} + \mathrm{E}_{2}-\mathrm{2B}} \,\cdot\, \underbrace{(\,1.\mathrm{M}_{1} \times 1.\mathrm{M}_{2}\,)}_{\text{Un-norm Mantissa}}\]Based on the definition of floating-point representation as described previously, the sign, exponent, and mantissa of a product should be:
\[\begin{aligned} \mathrm{S_{P}} \,&=\, \mathrm{S}_{1} \oplus\, \mathrm{S}_{2} \\[0.3em] \mathrm{M_{P}} \,&=\, \begin{cases} \; (\,1.\mathrm{M}_{1} \times 1.\mathrm{M}_{2}\,) & \text{if un-norm mantissa} \leq 2 \\[0.1em] \;(\,1.\mathrm{M}_{1} \times 1.\mathrm{M}_{2}\,) \;/\; 2 & \text{if un-norm mantissa} > 2 \end{cases} \\[0.3em] \mathrm{E_{P}} \,&=\, \begin{cases} \;\mathrm{E}_{1} + \mathrm{E}_{2}-\mathrm{B} & \quad \text{if un-norm mantissa} \leq 2 \\[0.1em] \;\mathrm{E}_{1} + \mathrm{E}_{2}-\mathrm{B} + 1 & \quad \text{if un-norm mantissa} > 2 \\ \end{cases} \\ \end{aligned}\]The above formula shows that:
- The product sign bit is simply a logical XOR between the sign bits of \(\mathrm{F}_{1}\) and \(\mathrm{F}_{2}\,\).
- The product mantissa can be obtained via unsigned integer multiplication between two input mantissa (\(1.\mathrm{M}_{1}\) and \(1.\mathrm{M}_{2}\)). A conditional check (a.k.a normalization) is needed to determine whether the un-normalized mantissa product is larger than 2. If yes, the un-normalized mantissa should be divided by 2, i.e., normalized to the range \([1, 2)\).
- The product exponent can be obtained via unsigned integer addition / subtraction between two input exponents (\(\mathrm{E}_{1}\) and \(\mathrm{E}_{2}\)) and the exponent bias (\(\mathrm{B}\))
Note that we only subtract a single bias from (E1 + E2), since the standard floating-point representation will automatically subtract another exponent bias. . As discussed before, integer adder and multiplier have area complexity of \(\mathrm{O(N)}\) and \(\mathrm{O(N^2)}\), respectively. Since the cost of XORing the sign bit is negligible, the area complexity of a \(\mathrm{\mathbf{ExMy}}\) floating-point multiplier is roughly \(\mathrm{O(\,2x +(y+1)^2\,)}\). The following table shows the synthesized combinational logic area of BF16, FP16, and FP32 multipliers without the normalization stageIn a MAC unit, the normalization stage is placed after the accumulator. , under 28nm technology. It can be observed that the area complexity offers a good estimation of the relative multiplier area across different floating-point representations.
| Representation | Area Complexity | Multiplier Area |
|---|---|---|
| BF16-E8M7 | 80 (1×) | 167.2 um2 (1×) |
| FP16-E5M10 | 131 (1.64×) | 260.9 um2 (1.56×) |
| FP32-E8M23 | 592 (7.4×) | 1166.8 um2 (6.98×) |
Floating-Point Addition
Again, consider two normal floating-point numbers \(\mathrm{F}_{1}\) and \(\mathrm{F}_{2}\,\):
\[\begin{aligned} \mathrm{F_1} \,&=\, (-1)^{\,\mathrm{S}_{1}} \,\cdot\, 2^{\,\mathrm{E}_{1}-\mathrm{B}} \,\cdot\, 1.\mathrm{M}_{1} \\ \mathrm{F_2} \,&=\, (-1)^{\,\mathrm{S}_{2}} \,\cdot\, 2^{\,\mathrm{E}_{2}-\mathrm{B}} \,\cdot\, 1.\mathrm{M}_{2} \end{aligned}\]Let’s assume \(\mathrm{E}_{1} \geq \mathrm{E}_{2\,}\), then \(\mathrm{F}_{2}\) can be re-written as:
\[\mathrm{F_2} \,=\, (-1)^{\,\mathrm{S}_{2}} \,\cdot\, 2^{\,\mathrm{E}_{1}-\mathrm{B}} \,\cdot\, \left(\,1.\mathrm{M}_{2} \;/\; 2^{\,\mathrm{E}_{1}-\mathrm{E}_{2}}\,\right) \,=\, (-1)^{\,\mathrm{S}_{2}} \,\cdot\, 2^{\,\mathrm{E}_{1}-\mathrm{B}} \,\cdot\, \left(\,1.\mathrm{M}_{2} \gg (\mathrm{E}_{1}-\mathrm{E}_{2})\,\right)\]The above step is called “Exponent Alignment”, where the two input exponents are compared and aligned to the larger one. Since we increase the exponent of \(\mathrm{F}_{2}\) by \((\,\mathrm{E}_{1}-\mathrm{E}_{2}\,)\), its mantissa needs to be divided by \(2^{\,\mathrm{E}_{1}-\mathrm{E}_{2}}\), which is equivalent to right-shifting the mantissa by \((\mathrm{E}_{1}-\mathrm{E}_{2})\) bits.
The addition sum can then be expressed as:
\[\mathrm{F_1} + \mathrm{F_2} \,=\, 2^{\,\mathrm{E}_{1} - \mathrm{B}} \,\cdot\, \underbrace{\left[\; (-1)^{\,\mathrm{S}_{1}} \cdot 1.\mathrm{M}_{1} \;+\; (-1)^{\,\mathrm{S}_{2}} \cdot \left(\,1.\mathrm{M}_{2} \gg (\mathrm{E}_{1}-\mathrm{E}_{2})\,\right) \;\right]}_{\text{Un-norm Mantissa}}\]The sum’s sign and mantissa are derived from the above un-normalizaed mantissa through a hardware normalization block, which does some post-processing to ensure the final mantissa is normalized to the range \([1, 2)\).
Based on the above analysis, you may notice that it’s not straightforward to derive a good upper bound for the floating-point adder’s area complexity. There are also many low-level design considerations that vary across different hardware vendors when they design a floating-point adder. For example, how many bits should we reserve for accumulating the shifted mantissa \(1.\mathrm{M}_{2} \gg (\mathrm{E}_{1}-\mathrm{E}_{2})\) after exponent alignment? At FP32-E8M23, the largest and smallest representable exponents are \(127\) and \(-126\), respectively. This means that the 24-bit input mantissa (including the hidden bit) can be right-shifted by up to \(253\) bits, leading to a total precision of \(277\) bits for accumulating two aligned mantissa, which is clearly not a practical choice. Thus, in reality, the shifted mantissa is always truncated and accumulated with much lower precision
II. Quantization Basics
Let’s now jump into quantization: one of the most popular methods to improve the hardware efficiency of LLMs.
II-1. Classification of Quantization Methods
Before diving into technical details, I would like to classify existing quantization methods into two broad categories: compute-based and memory-based, depending on how they interpret the low-precision operands in hardware
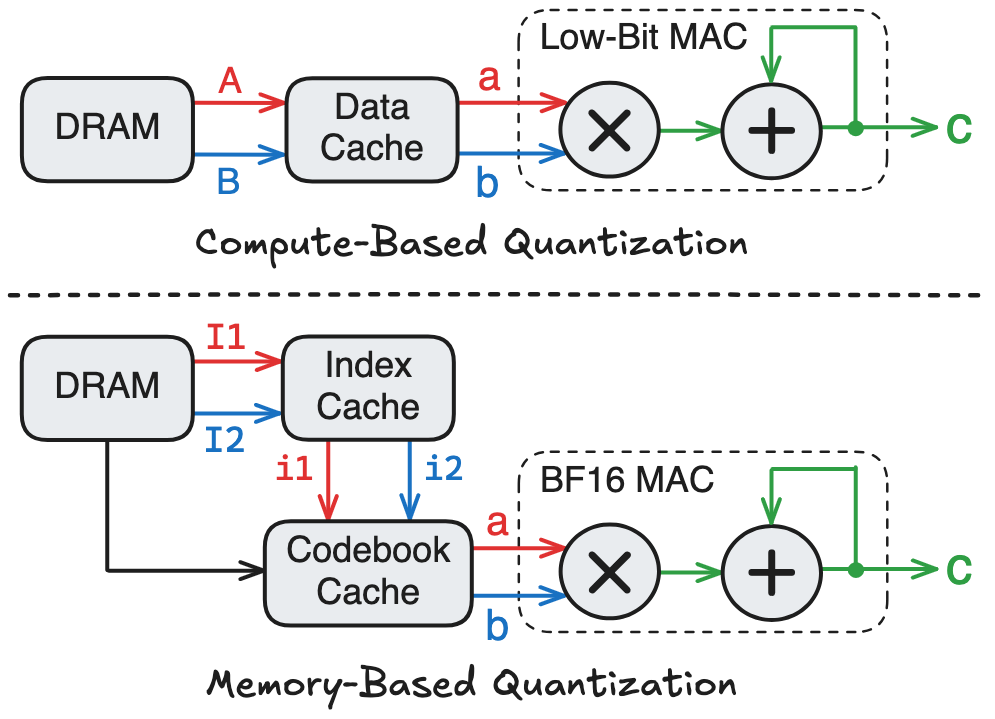
- Compute-based Quantization: The retrieved low-bit data from memory can be directly used to perform MAC. Examples include quantizing a tensor from BF16 to INT8 / FP8 / FP4, etc.
- Memory-based Quantization: The retrieved low-bit data from memory cannot be used to perform MAC. Instead, the low-bit data serves as an index to access another memory, which is often called a codebook and stores high-precision data (e.g., in BF16). The codebook access returns the actual data that is used to perform MAC.
Compute-based quantization enables computation on low-bit MAC hardware, whereas memory-based quantization requires an additional memory access to the codebook cache before performing computation on BF16 MAC hardware. Hence, at the same model compression ratio, compute-based quantization typically consumes significantly less area and energy, making it the favorable approach in modern LLMs
II-2. Mathematical Background
Given a tensor represented in high-precision floating-point (e.g., BF16), the purpose of quantization is to convert this tensor to a lower-precision format (e.g., INT8 / FP8), where every tensor element is mapped to its closest quantization value. However, directly mapping a high-precision number to a low-precision format can introduce many issues, such as overflow and underflow, which are illustrated below:
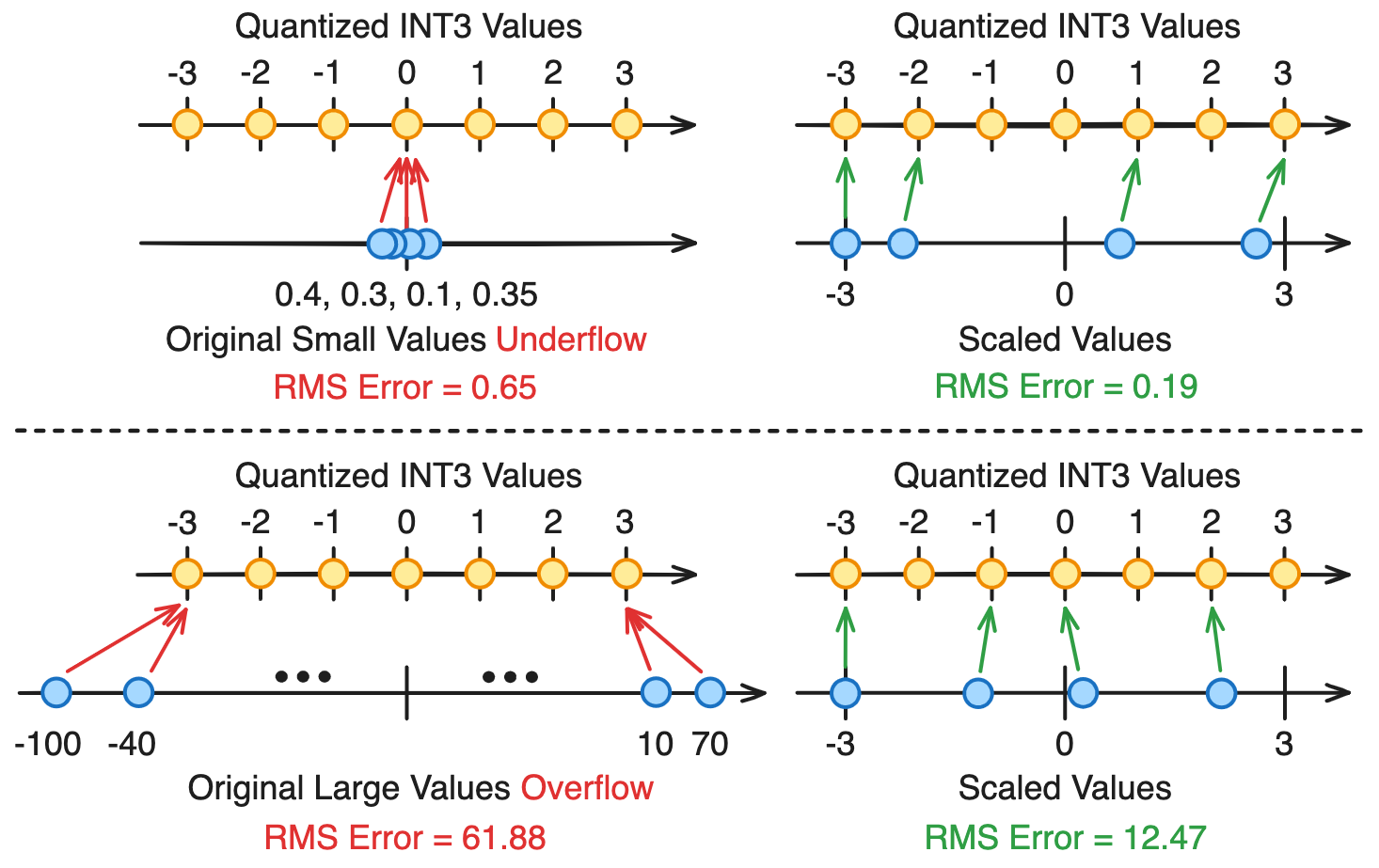
The above example quantizes a tensor of four elements to the 3-bit sign-magnitude integer (INT3) representation, and measures the resulting root-mean-square (RMS) quantization error. As shown in the top-left figure, if the original tensor contains very small values that are close to zero, directly casting to INT3 will make all values underflow to zero, resulting in catastrophic information loss. Similarly, as shown in the bottom left-figure, if the original tensor contains very large values that overflow the INT3 range, directly casting to INT3 will clamp these large values to the endpoint of INT3, resulting in significant saturation error.
To address the overflow and underflow issues, standard quantization linearly scales the original tensor to the quantized value range, then rounds each scaled tensor value to its nearest quantization value. After quantization, a re-scaling / dequantization step is performed at the end to map the quantized tensor back to the original tensor’s range. This procedure is summarized by the following equations:
\[\mathrm{S} = \frac{ |\mathrm{X}|_{\text{max}} }{ \mathrm{Q}_{\text{max}} } ; \ \ \ \mathrm{X_\mathrm{S}} = \frac{\mathrm{X}}{\mathrm{S}} ; \ \ \ \mathrm{X_Q} = \texttt{Round}\left(\,\mathrm{X_\mathrm{S}}\,,\, \mathrm{Q}\,\right) ; \ \ \ \mathrm{X_\mathrm{D}} = \mathrm{X_Q} \cdot \mathrm{S}\]where \(\mathrm{X}\) is the original high-precision tensor, \(\mathrm{Q}\) is the set of quantization values defined by a low-bit number representation, \(\mathrm{S}\) is a high-precision scale factor, \(\mathrm{X_{S}}\) is the scaled tensor, \(\mathrm{X_{Q}}\) is the quantized tensor, and \(\mathrm{X_{D}}\) is the dequantized tensor. As shown in the above example, scaling can effectively mitigates the impact of overflow / underflow. When the tensor values are very small, scaling can enlarge the tensor range so that many elements are mapped to meaningful quantization values. When the tensor values are very large, scaling can prevent large saturation error.
Because of scaling, if two sets of quantization values, \(\mathrm{Q_{1}}\) and \(\mathrm{Q_{2}}\), differ only by a constant factor, then they produce mathematically equivalent results after dequantization:
\[\begin{aligned} \text{Assume}: \quad &\mathrm{Q_{2}} = c\,\mathrm{Q_{1}} \\[0.3em] \text{With }\mathrm{Q_{1}}: \quad & \mathrm{S_{1}} = \frac{ |\mathrm{X}|_{\text{max}} }{ \mathrm{Q}_{1,\text{max}} } ; \ \ \mathrm{X_{S_{1}}} = \frac{\mathrm{X}}{\mathrm{S_{1}}} ; \ \ \mathrm{X_{Q_{1}}} = \texttt{Round}\left(\mathrm{X_{S_{1}}}, \mathrm{Q_{1}}\right) ; \ \ \mathrm{X_{D_{1}}} = \mathrm{X_{Q_{1}}} \cdot \mathrm{S_{1}} \\[0.3em] \text{With }\mathrm{Q_{2}}: \quad & \mathrm{S_{2}} = \frac{ \mathrm{S_{1}} }{ c } ; \ \ \mathrm{X_{S_{2}}} = \frac{c\,\mathrm{X}}{\mathrm{S_{1}}} ; \ \ \mathrm{X_{Q_{2}}} = \texttt{Round}\left(c\,\mathrm{X_{S_{1}}}, \mathrm{c\,Q_{1}}\right) = c\,\mathrm{X_{Q_{1}}} ; \ \ \mathrm{X_{D_{2}}} = \mathrm{X_{Q_{2}}} \cdot \mathrm{S_{2}} = \mathrm{X_{D_{1}}} \\[0.3em] \end{aligned}\]For example, at 4-bit quantization, you might have seen some papers using a format called E1M2, which has the set of quantization values \(\pm\{\,0,\, 0.25,\, 0.5,\, 0.75,\, 1,\, 1.25,\, 1.5,\, 1.75\,\}\). This is actually equivalent to INT4 quantization with the set of values \(\pm\{\,0,\, 1,\, 2,\, 3,\, 4,\, 5,\, 6,\, 7\,\}\).
II-3. Hardware Benefits of Quantized GEMM
By reducing the operand bit-width, quantization not only decreases the memory footprint, but also enables more efficient computation on low-precision MAC hardware. When the baseline LLM stores model weights and input activations in BF16, its linear layer will perform a GEMM using BFP16 multiply and FP32 accumulation. As an example, if we employ per-tensor quantization to convert model weights and input activations to INT8, the linear layer can instead perform a GEMM using INT8 multiply and INT32 accumulation, followed by dequantization that multiplies the output matrix with two scale factors. This is visualized below:
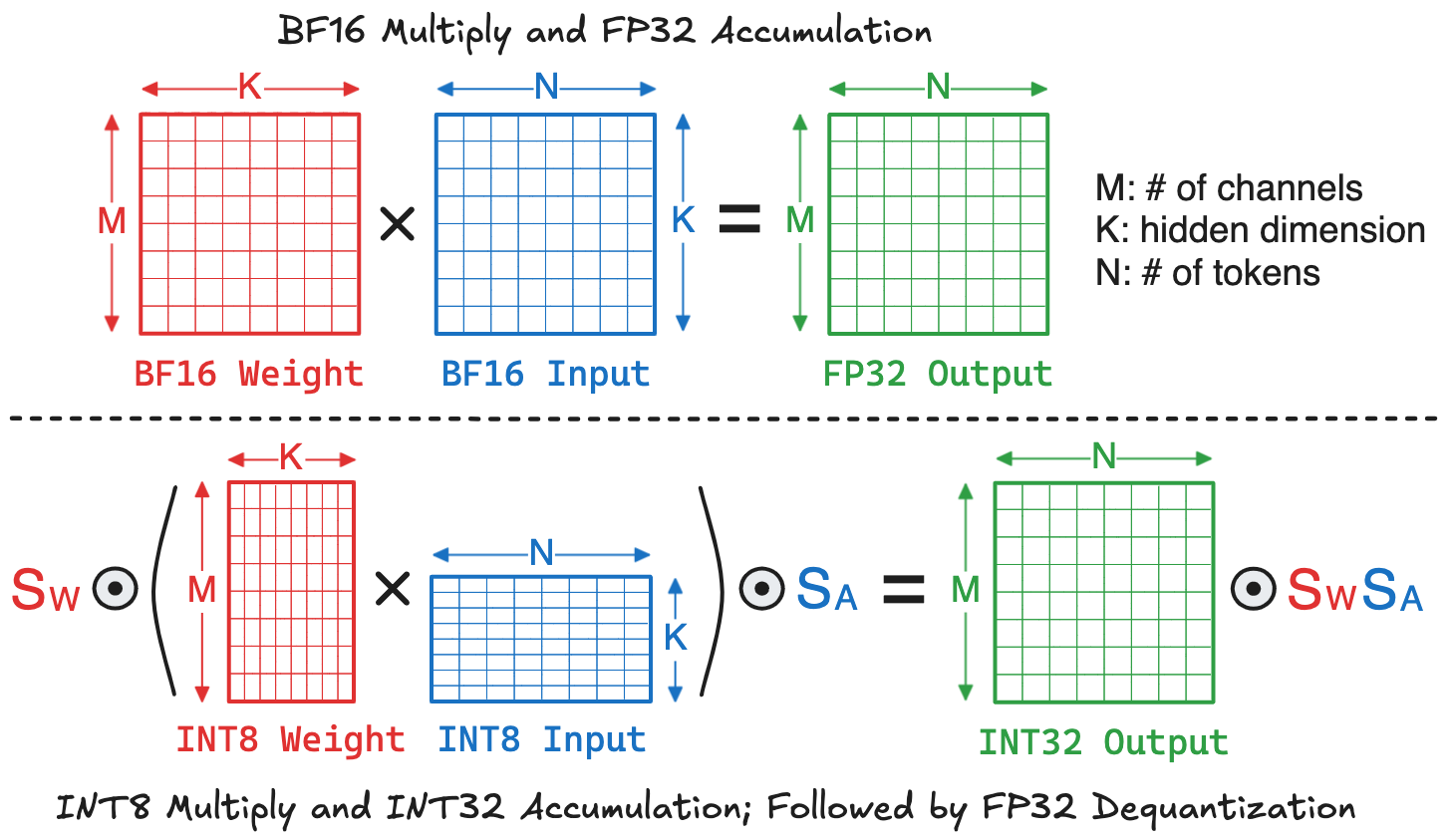
To understand the hardware implication of these two approaches, we can break down the hardware cost into two parts: memory and computation. The memory can be quantified as the total number of bytes required to store weights, inputs, and outputs. Accordingly, the memory costs of baseline and quantized GEMMs are:
\[\begin{aligned} \text{Baseline:} & \ \ 2MK + 2KN + 4MN \\ \text{Quantized:} & \ \ MK + KN + 4MN \end{aligned}\]For computation, recall that a GEMM with size \(M\times K \times N\) requires \(MKN\) MAC operations. For dequantization, the scale factors \(\mathrm{S_{W}}\) and \(\mathrm{S_{A}}\) can be pre-multiplied and stored as a constant. Multiplying this constant with the output matrix requires \(MN\) multiplications. Thus, the computation costs of baseline and quantized GEMMs are:
\[\begin{aligned} \text{Baseline:} & \ \ MKN \cdot \text{MAC}_{\text{BF16-FP32}} \\ \text{Quantized:} & \ \ MKN \cdot \text{MAC}_{\text{INT8-INT32}} \,+\, (MN+1) \cdot \text{MUL}_{\text{FP32}} \end{aligned}\]In modern LLMs, the \(K\)-dimension is usually very large (e.g., several thousands), making the cost of dequantization negligible compared to MAC. Consequently, the compute cost is roughly proportional to the cost of MAC units. The following table summarizes the synthesized area and energy of MAC units at different input-output precisions under 28nm technology. It can be observed that integer quantization can significantly reduce the computation cost compared to high-precision floating-point operations
| Multiplier | Accumulator | Area (um2) | Energy (pJ) | ||
|---|---|---|---|---|---|
| Value | Ratio | Value | Ratio | ||
| INT8 | INT32 | 213.8 | 1× | 0.16 | 1× |
| INT8 | INT48 | 286.2 | 1.34× | 0.22 | 1.38× |
| INT16 | INT48 | 516.2 | 2.41× | 0.36 | 2.25× |
| BF16 | FP32 | 929.4 | 4.35× | 0.63 | 3.94× |
| FP32 | FP32 | 1994.7 | 9.33× | 1.28 | 8× |
III. Advanced Quantization Techniques
In this section, I will discuss several techniques for improving the performance of quantized LLM inference. Many of these techniques are widely adopted in SoTA LLMs and AI chips. From an algorithm-hardware co-design perspective, a good quantization strategy introduces a trade-off between model accuracy, memory footprint, and computational efficiency. These trade-offs will also be examined throughout this section.
III-1. Block-Wise Quantization
Block-wise quantization is employed in many recent LLMs such DeepSeek-V3, GPT-OSS, and Kimi-K2. Before diving into this technique, let’s first understand the concept of outliers. An outlier is defined as a value whose magnitude is significantly larger than the rest of values in a tensor. It is well known that LLM tensors contain extreme outliers, and preserving the numerical fidelity of these outliers is the key to reducing quantization error and improving model performance
Quantization granularity measures how many elements are scaled and quantized together. For example, the coarsest quantization granularity is simply Tensor-Wise Quantization. But at this granularity, even a single outlier can significantly squeeze most of the remaining values, making them underflow to zero after quantization. This phenomenon is visualized in the following top-left figure, which uses INT4 sign-magnitude representation to quantize a \(3\times4\) tensor. To mitigate the impact of outliers, we can reduce the quantization granularity so that fewer values are quantized together. For example, Row-Wise Quantization applies independent scaling to each row of a tensor, limiting the effect of an outlier to values within the same row, as illustrated in the following top-right figure. On top of row-wise quantization, the granularity can be further reduced by partitioning each row into smaller segments / blocks, an approach called Block-Wise Quantization, which further constrains the impact of outliers to a small block. This is illustrated in the following bottom figure, where a row is partitioned into two blocks:
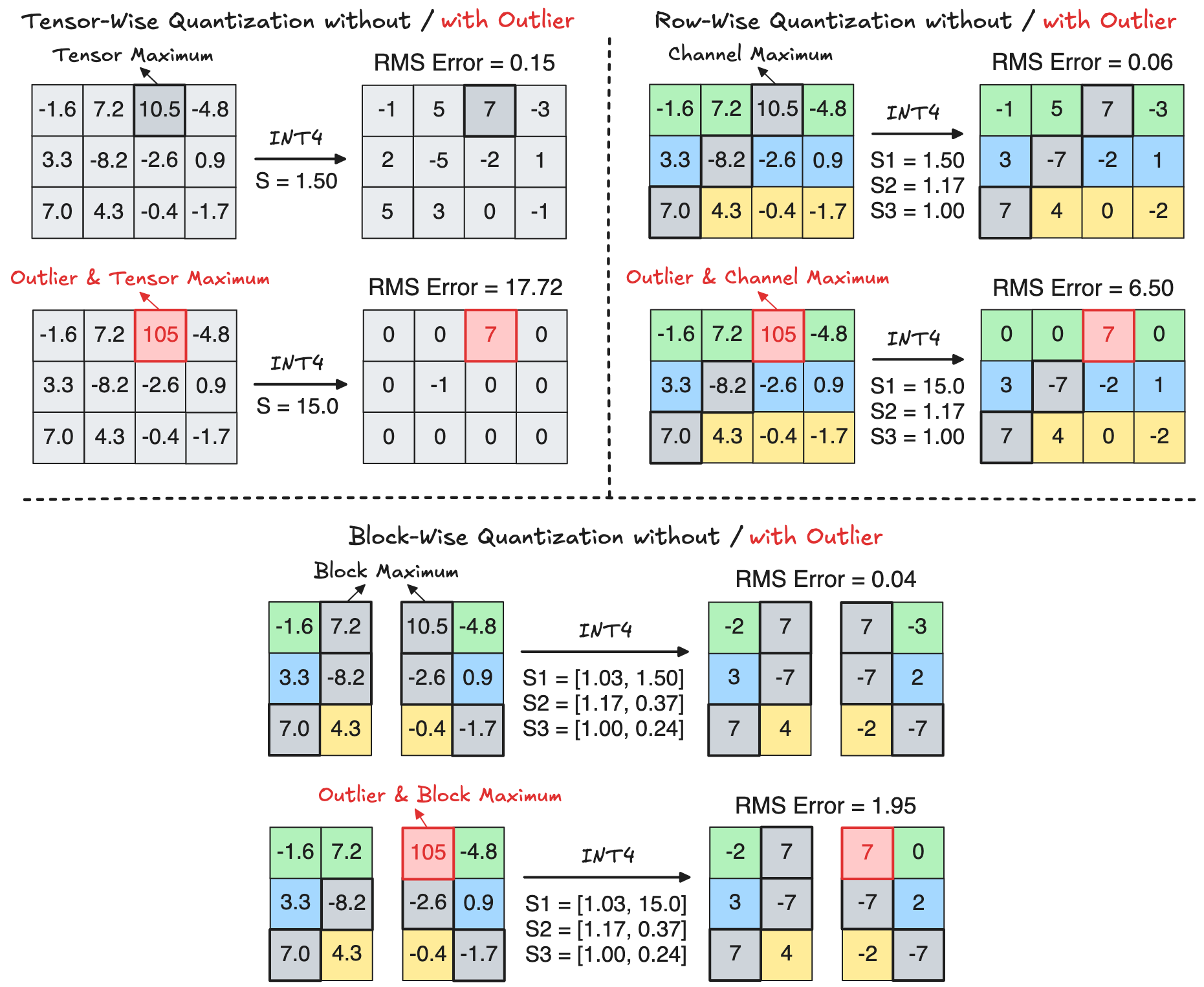
Why Does Block-Wise Quantization Help? Let’s analyze how quantization affects the maximum element \(\mathrm{X}_{\text{max}}\)
The above last equation unveils a critical insight: If the scale factor is accurately computed (e.g., using high precision such as FP32), then the original maximum element remains unchanged after dequantization, regardless of the quantization granularity. In other words, the maximum element of a granularity has no quantization error. Therefore, under a finer quantization granularity, more maximum elements can be represented accurately, leading to lower total quantization error.
Algorithm-Hardware Trade-Off under Different Granularity: As discussed above, an obvious benefit of reduced quantization granularity is lower quantization error, which potentially offers better model accuracy. However, this algorithmic benefit comes with additional computation and memory costs. Below, I try to visualize the computation flow of performing a \(M\times K \times N\) GEMM under different INT4 quantization granularity:
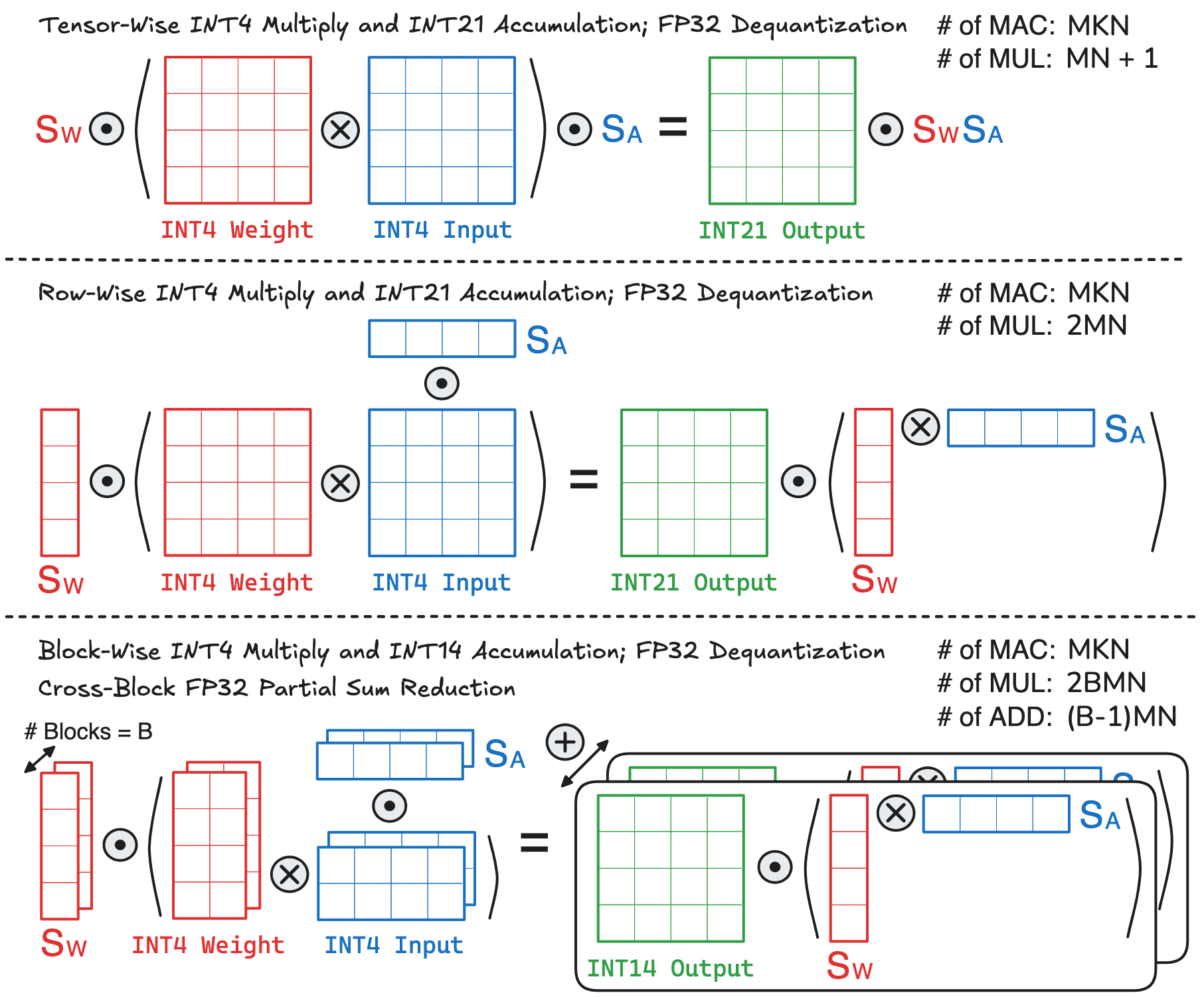
- Tensor-Wise Quantization: This is the coarsest granularity, where the GEMM requires \(MKN\) low-precision MAC operations. For dequantization, the FP32 scale factors \(\mathrm{S_{W}}\) and \(\mathrm{S_{A}}\) can be pre-multiplied and stored as a constant, and multiplying this constant with the output matrix requires \(MN\) FP32 multiplications.
- Row-Wise Quantization: The whole GEMM still requires \(MKN\) low-precision MAC operations. But for dequantization, the row-wise scale factors of weight and activation are vectors of size of \(M \times 1\) and \(N \times 1\), respectively. These two vectors first perform an outer product, which is then element-wise multiplied with the output matrix, leading to \(2MN\) FP32 multiplications.
- Block-Wise Quantization: Since a matrix row is partitioned into multiple blocks, the complete row-wise dot product will contain \(B\) partial sums, where \(B\) is the number of blocks. This means that the whole GEMM is partitioned into \(B\times\) small GEMMs, each of size \((M \times K/B \times N)\) with row-wise quantization (a block of the original large GEMM can be viewed as a row of the small GEMM). The total number of low-precision MAC operations remains \(B \times (M \times K/B \times N) = MKN\). The tricky part comes to the dequantization process: every small GEMM requires \(2MN\) multiplications as in row-wise quantization, leading to a total of \(2BMN\) FP32 multiplications. But the dequantized output matrix of every small GEMM only forms a partial sum, which also needs to be reduced over all blocks, leading to a total of \((B-1)MN\) extra FP32 additions.
One thing I didn’t explain in the above figure, which you might find a little weird, is the output matrix precision. When I talk about BF16 GEMM and INT8 GEMM in previous sections, I used FP32 and INT32 as the output precision. However, the output matrix precision can be reduced according to the input precision, which in turn reduces the hardware accumulator precision and cost. Taking the above example, the sign-magnitude INT4 representation has a numerical range of \([-7, 7]\), and multiplying two INT4 numbers yields a range of \([-49, 49]\). Consider a trillion-parameter LLM such as Kimi-K2.5, whose maximum dot product size of \(18432\). Under tensor-wise and row-wise INT4 quantization
The memory costs of different quantization granularity are much simpler to analyze. In addition to weight, input, and output, quantization stores extra metadata such as the scale factors. For tensor-wise and row-wise quantization, the memory cost of scale factors is pretty negligible when the dot product size is large enough, which is the case for modern LLMs. However, this assumption may not hold for block-wise quantization. For example, with a block size of \(128\), an FP32 scale factor introduces an overhead of \(32/128 = 0.25\) bits per element. As the block size further decreases (to improve model performance), the storage overhead of scale factors can no longer be ignored. Thus, for the next quantization technique, I will discuss how to reduce the overhead of scale factors.
III-2. Scale Factor Quantization
While block-wise quantization brings algorithmic benefits by reducing quantization error, it incurs additional hardware cost from storing numerous FP32 scale factors and performing more FP32 multiplications / additions during dequantization. This overhead restricts the use of very small block sizes, which are often critical for achieving high accuracy under 4-bit quantization.
The question is: How can we reduce the cost of scale factors? The answer is surprisingly straightforward: if quantization can reduce the memory and computation costs of tensor elements, why not apply it to scale factors? Building on this idea, the industry has proposed two methods to quantize the block scale: Microscaling (MX)
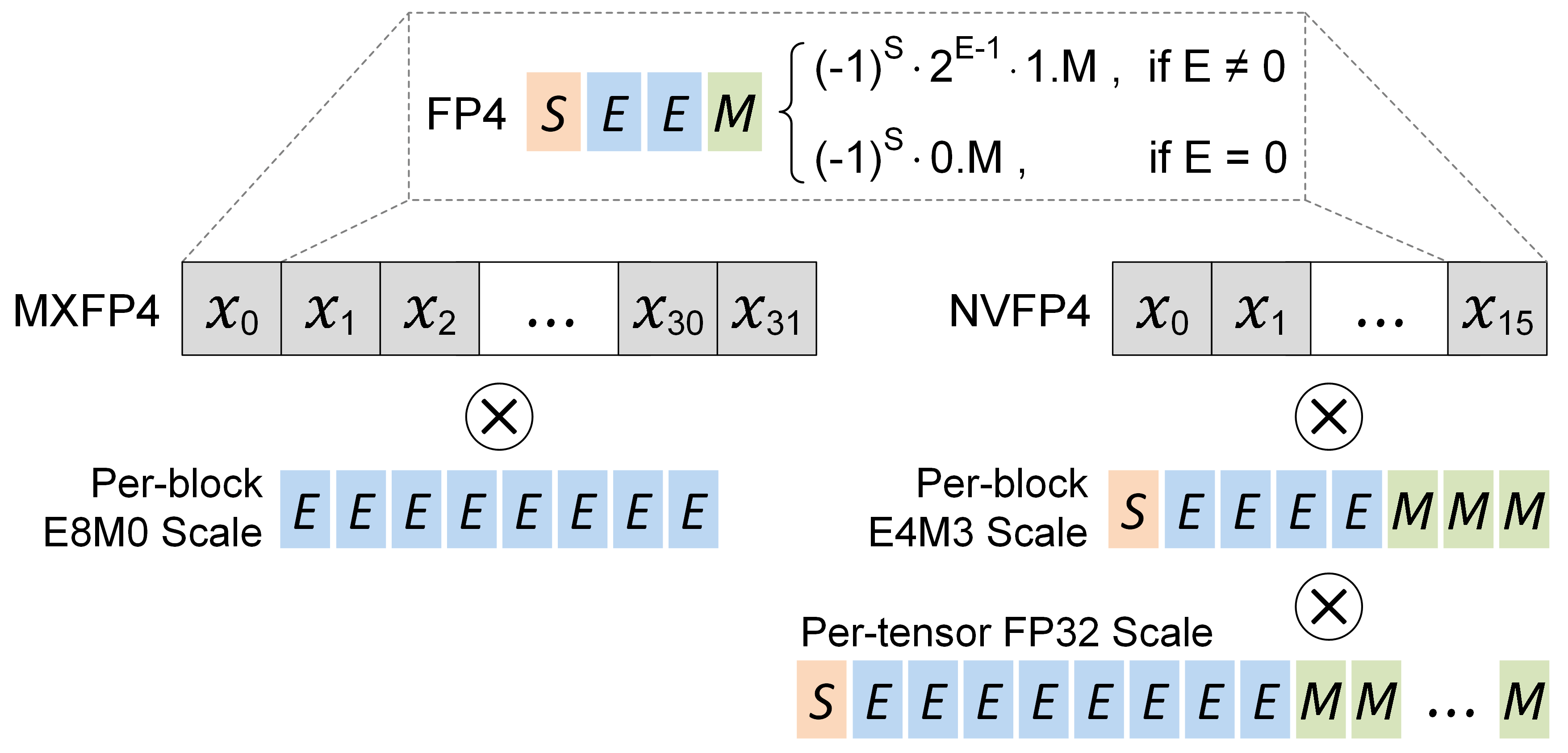
Microscaling (MX)
MX is standardized by the Open Compute Project, and widely supported by recent AI chips such as AMD Radeon, Meta MTIA, and Microsoft MAIA. In this approach, the high-precision scale factor is quantized to an 8-bit power-of-two (E8M0). For example, the widely used MXFP4 quantization scheme can be expressed by the following equations
where \(\mathrm{B}\) is the block to be quantized, and \(\mathrm{Q}_{\text{max}} = 6\) is the maximum FP4 quantization value. After calculating the scale factor \(\mathrm{S}\), we take its binary logarithm followed by a ceiling operation to obtain the integer exponent
The purpose of rounding up during the power-of-two scale factor quantization in MXFP4, is to ensure the scaled block \(\mathrm{B_{S}}\) can always remains within the representable quantization range without significant overflow. Specifically, we want to ensure that:
\[\begin{aligned} |\mathrm{B_{S}}| \leq \mathrm{Q}_{\text{max}} \iff |\mathrm{B_{\text{max},\,S}}| \leq \mathrm{Q}_{\text{max}} \iff \frac{|\mathrm{B_{\text{max}}}|}{\mathrm{S_{Q}}} \leq \mathrm{Q}_{\text{max}} \iff \mathrm{S_{Q}} \geq \frac{|\mathrm{B_{\text{max}}}|}{\mathrm{Q}_{\text{max}}} \iff \mathrm{S_{Q}} \geq\, \mathrm{S} \end{aligned}\]Interested readers may ask: Why don’t we use the normal rounding (up or down) mechanism when rounding the scale factor to its nearest power-of-two? In fact, this is exactly what the original MXFP4 quantizer from Microsoft does when the block maximum’s mantissa exceeds the quantization maximum’s mantissa
Since \(\mathrm{B}_{\text{max}}\) is a positive normal FP32 value, I can write it in floating-point representation as described in Section I-2:
\[\mathrm{B_{\text{max}}} = 0\;\mathrm{\underbrace{E_{7}\dots E_{0}}_{\text{Exponent}} \; \underbrace{M_{22}\dots M_{0}}_{\text{Mantissa}}} = (-1)^0 \cdot 2^{\mathrm{E}-127} \cdot (\,1+\mathrm{M}\,) = 2^{\mathrm{E\,'}} \cdot \mathrm{M\,'}\]where \(\mathrm{E\,'}\) is the actual exponent after subtracting the bias \(127\), and \(\mathrm{M\,'}\) is the actual mantissa after adding the hidden bit \(1\) for normal values. Using this representation, the scale factor can be expressed as:
\[\mathrm{S} = \frac{\mathrm{B}_{\text{max}}}{6} = \frac{ 2^{\,\mathrm{E\,'}} \cdot \mathrm{M\,'} }{ 2^2 \cdot 1.5 } = 2^{\,\mathrm{E\,'} - \,2} \cdot \frac{\mathrm{M\,'}}{1.5}\]Now, consider the 50% case where \(\mathrm{M\,'} > 1.5\)
The above derivation implies that: If the mantissa of \(\mathrm{B}_{\text{max}}\) is larger than 1.5, then \(\mathrm{B_{\text{max},\,S}}\) will overflow outside the FP4 range
Now, \(\mathrm{B_{\text{max},\,Q}}\) can be mapped to two representable FP4 values: \(3\) or \(4\), whichever is closer to \(\mathrm{B_{\text{max},\,S}}\). This offers more flexibility compared to the naive rounding mechanism, where \(\mathrm{B_{\text{max},\,Q}}\) can only be mapped / clamped to \(6\).
The above analysis also indicates a hardware-efficient strategy for calculating the block scale of MXFP4:
if (B_max.man > 1.5):
block_exp = B_max.exp - 1
else: # (B_max.man <= 1.5)
block_exp = B_max.exp - 2
block_scale = 2 ** block_exp
which completely eliminates the division (\(\mathrm{B_{\text{max}}}\,/\,6\)), logarithm, and ceiling operations to compute the block scale. Assume the block element is represented in BF16-E8M7, then a SystemVerilog implementation can be:
input logic [15:0] B_max;
output logic [8:0] block_exp;
output logic [15:0] block_scale;
always_comb begin
if (B_max[6:0] > 7'b1000000) // Think why this is equivalent to (B_max.man > 1.5)
block_exp = B_max[14:7] - 1
else
block_exp = B_max[14:7] - 2
end
assign block_scale = {1'b0, block_exp, 7'd0};
To measure the algorithmic performance of MX under the two rounding approaches for scale factor quantization, I implement the naive MXFP4 quantizer and the enhanced MXFP4 quantizer. The following table shows the perplexity
| Llama-3.1-8B | Llama-3.2-3B | Qwen3-4B | Qwen3-8B | |
|---|---|---|---|---|
| Naive Round | 9.51 | 15.35 | 17.46 | 11.84 |
| Round-Up | 8.69 | 13.58 | 15.69 | 10.66 |
NVIDIA’s (NV) Approach
Recall from Section III-1, if the scale factor is accurately represented (e.g., in FP32), then the maximum element can be accurately quantized without error. However, the E8M0 scale factor used in MX violates this condition and introduces error for the block’s maximum element
Let’s try to understand the limitations of MX when quantizing the block maximum, \(\mathrm{B}_{\text{max}}\). Again, for simplicity, assume \(\mathrm{B}_{\text{max}}\) is a positive normal FP32 value:
\[\mathrm{B_{\text{max}}} = 0\;\mathrm{\underbrace{E_{7}\dots E_{0}}_{\text{Exponent}} \; \underbrace{M_{22}\dots M_{0}}_{\text{Mantissa}}} = (-1)^0 \cdot 2^{\mathrm{E}-127} \cdot (\,1+\mathrm{M}\,) = 2^{\mathrm{E\,'}} \cdot \mathrm{M\,'}\]Since the scale factor of MX is power-of-two, scaling \(\mathrm{B}_{\text{max}}\) will only change its exponent without affecting mantissa:
\[\mathrm{B_{\text{max},\,S}} \,= \frac{\mathrm{B}_{\text{max}}}{\mathrm{S_{MX}}} \,= \frac{2^{\mathrm{E\,'}} \cdot \mathrm{M\,'}}{\mathrm{S_{MX}}} = \, 2^{\widetilde{\mathrm{E}}} \cdot \mathrm{M\,'}\]Comparing the above result with the case of accurate FP32 scaling:
\[\mathrm{S}_{\text{FP32}} = \frac{ \mathrm{B}_{\text{max}} }{ \mathrm{Q}_{\text{max}} }; \ \ \ \mathrm{B_{\text{max},\,S}} = \frac{ \mathrm{B}_{\text{max}}}{\mathrm{S}_{\text{FP32}}} = \mathrm{Q}_{\text{max}}\]We observe the accurate scaling gives \(\mathrm{B_{\text{max},\,S}} = \mathrm{Q}_{\text{max}\,}\), which implies the mantissa of \(\mathrm{B_{\text{max},\,S}}\) is equal to that of \(\mathrm{Q}_{\text{max}}\) (e.g., \(1.5\) for FP4). However, under MX scaling, the mantissa of \(\mathrm{B_{\text{max},\,S}}\) is equal to that of \(\mathrm{B_{\text{max}}\,}\), which can take any value in \([\,1.0,\, 2.0\,)\). Consequently, MX can be viewed as effectively quantizing the mantissa of \(\mathrm{B_{\text{max}}}\) to the representable mantissa of \(\mathrm{Q}\)
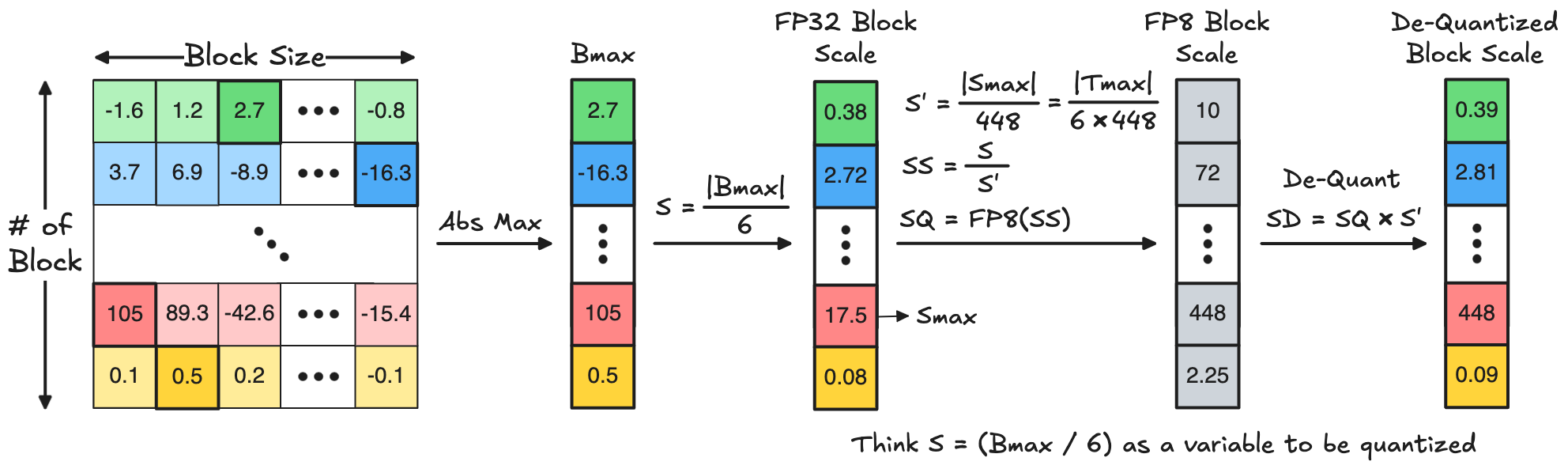
Building on this insight, NVIDIA (NV) proposes to employ FP8-E4M3, the 8-bit floating-point format with 4-bit exponent and 3-bit mantissa, for block scale quantization, as described in the following equations:
\[\begin{aligned} &\mathrm{S} = \frac{ |\mathrm{B}_{\text{max}}| }{ \mathrm{Q}_{\text{B,max}} } \\[0.3em] &\mathrm{S'} = \frac{ \mathrm{S}_{\text{max}} }{ \mathrm{Q}_{\text{S,max}} } = \left(\frac{ |\mathrm{B}_{\text{max}}| }{ \mathrm{Q}_{\text{B,max}}}\right)_{\text{max}} \cdot \frac{1}{\mathrm{Q}_{\text{S,max}} } = \frac{|\mathrm{B}_{\text{max}}|_{\text{max}}}{\mathrm{Q}_{\text{B,max}}} \cdot \frac{1}{\mathrm{Q}_{\text{S,max}}} = \frac{|\mathrm{T}_{\text{max}}|}{\mathrm{Q}_{\text{B,max}} \cdot\mathrm{Q}_{\text{S,max}}} \\[0.3em] &\mathrm{S_S} = \frac{\mathrm{S}}{\mathrm{S'}} \\[0.3em] &\mathrm{S_Q} = \texttt{Round}\left(\,\mathrm{S_S}\,,\, \text{FP8}\,\right) \\[0.3em] &\mathrm{S_\mathrm{D}} = \mathrm{S_Q} \cdot \mathrm{S'} \end{aligned}\]where \(\mathrm{Q}_{\text{B,max}}\) is the maximum quantization value for the block element, \(\mathrm{Q}_{\text{S,max}}\) is the maximum quantization value for the block scale (i.e., \(448\) for FP8), \(\mathrm{S}'\) is the scale of block scale, \(\mathrm{T}_{\text{max}}\) is the tensor maximum, \(\mathrm{S_{S}}\) is the scaled block scale, \(\mathrm{S_{Q}}\) is the quantized block scale, and \(\mathrm{S_{D}}\) is the final dequantized block scale. This block scale quantization process is exactly the same as how we quantize a tensor as discussed in Section II-2. The mathematical equations are therefore also the same as those for tensor quantization, except that we change \(\mathrm{X}\) to \(\mathrm{S}\), \(\mathrm{S}\) to \(\mathrm{S'}\), and \(\mathrm{Q}\) to FP8. Below is a visualization to help you understand the FP8 block scale quantization using the popular NVFP4 format (i.e., \(\mathrm{Q}_{\text{B,max}}\) = 6) as an example.
The above equation for calculating \(\mathrm{S'}\) indicates a tensor-wise scaling, as also described in NVIDIA’s blog
You may also wonder: Why choosing E4M3 instead of other FP8 variants such as E5M2 / E3M4 when quantizing the block scale? The reason is that, empirically, E4M3 can better fit the numerical distribution of block maxima
Thanks to the capability of mantissa scaling, NV reduces the quantization error of scale factors compared to MX, which in turn reduces the quantization error of block elements. To quantify these benefits, I implement the NVFP4 quantizer and compare it with the enhanced MXFP4 quantizer discussed in the last section. The following table shows the perplexity of Wikitext-2 dataset on several Llama3 and Qwen3 models, under NVFP4 and MXFP4 weight-activation quantization with a block size of 16. NVFP4 achieves much better perplexity than MXFP4.
| Llama-3.1-8B | Llama-3.2-3B | Qwen3-4B | Qwen3-8B | |
|---|---|---|---|---|
| Enhanced MXFP4 | 8.69 | 13.58 | 15.69 | 10.66 |
| NVFP4 | 7.90 | 11.97 | 13.88 | 10.05 |
Hardware Implication of MX and NV
The different approaches of MX and NV for block scale quantization introduce a trade-off between model accuracy and computation cost
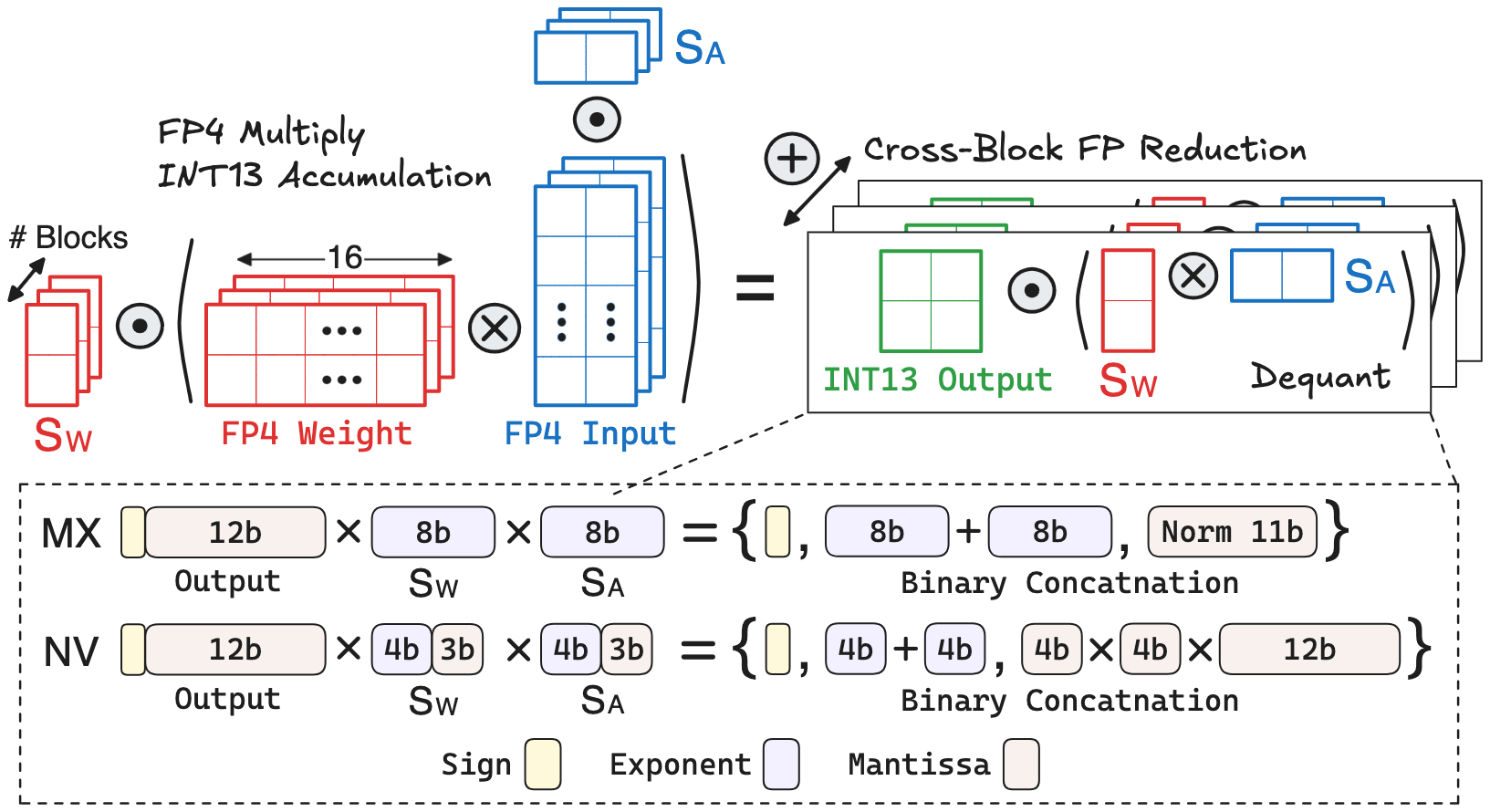
Consider the popular FP4 block-wise quantization under a block size of 16. Let’s analyze the hardware cost of performing block-wise GEMM with the two scale factor quantization approaches:
- Block Dot-product: Since the maximum and minimum FP4 values are \(\pm6\) and \(\pm0.5\), a single FP4 multiplication ranges from \(\pm0.25\) to \(\pm36\), which can be represented using 9-bit fixed-point. With a block size of 16, the dot-product result becomes 13 bits.
-
MX Dequantization: To analyze the hardware cost, let’s first write out the binary / decimal values of block scale and dot-product output:
\[\begin{aligned} \mathrm{S_{W}} &=\, \mathrm{E_{W}} =\, \mathrm{\underbrace{E_{7}\dots E_{0}}_{\text{Exponent}}} \,=\, 2^{\mathrm{E_{W}}-127} \\[0.3em] \mathrm{S_{A}} &=\, \mathrm{E_{A}} =\, \mathrm{\underbrace{E_{7}\dots E_{0}}_{\text{Exponent}}} \,=\, 2^{\mathrm{E_{A}}-127} \\[0.3em] \mathrm{O} \,&=\, \mathrm{S \underbrace{M_{11}\dots M_{0}}_{\text{Un-norm Mantissa}}} =\, (-1)^{\,\mathrm{S}} \cdot \left(\,\Sigma_{j=0}^{11}\,2^{j-2}\cdot\mathrm{M}_{j} \right) \end{aligned}\]Based on the above equations, the dequantized output should be:
\[\mathrm{O_{D}} \,=\, (-1)^{\,\mathrm{S}} \cdot\, 2^{\mathrm{E_{W}} + \mathrm{E_{A}}-254} \cdot \left(\,\underbrace{\Sigma_{j=0}^{11}\,2^{j-2} \cdot \mathrm{M}_{j}}_{\text{Un-norm Mantissa}} \,\right)\]Interestingly, this expression has a very similar structure to the standard 32-bit floating-point representation discussed in Section I-2:
\[\text{FP32} \,=\, \mathrm{\underbrace{S}_{Sign} \; \underbrace{E_7\dots E_{0}}_{\text{Exponent}} \; \underbrace{M_{22}\dots M_{0}}_{\text{Mantissa}}} \,= \,(-1)^{\mathrm{S}} \cdot\, \mathrm{2^{E-127} \cdot 1.{M}}\]The dequantized output sign is the FP32 sign, the FP32 exponent \(\mathrm{E} = \mathrm{E_{W}} + \mathrm{E_{A}} - 127\) is calculated via unsigned integer addition, and the FP32 mantissa is obtained via normalizing the dequantized output mantissa. This normalization only requires low-cost hardware components such as Leading-One Detector and Shifter. Finally, the three binary components: sign, exponent, mantissa of dequantized output, are concatenated together (via some simple wiring in hardware) to produce a FP20-E8M11
The dequantized output mantissa has 12 bits, but recall the floating-point representation has a hidden mantissa bit that is not stored. number for cross-block partial sum accumulation. To summarize, MX dequantization has low computation cost, involving mainly unsigned integer addition, a leading-one detector, and a shifter. -
NV Dequantization: Again, let’s write out the binary / decimal values of block scale and dot-product output:
\[\begin{aligned} \mathrm{S_{W}} &=\, \mathrm{\underbrace{E_{3}\dots E_{0}}_{\text{Exponent}} \;\underbrace{M_{2}\dots M_{0}}_{\text{Mantissa}}} \,=\, 2^{\mathrm{E_{W}}-7} \cdot 1.\mathrm{M_{W}} \\[0.3em] \mathrm{S_{A}} &=\, \mathrm{\underbrace{E_{3}\dots E_{0}}_{\text{Exponent}} \;\underbrace{M_{2}\dots M_{0}}_{\text{Mantissa}}} \,=\, 2^{\mathrm{E_{A}}-7} \cdot 1.\mathrm{M_{A}} \\[0.3em] \mathrm{O} \,&=\, \mathrm{S \underbrace{M_{11}\dots M_{0}}_{\text{Un-norm Mantissa}}} =\, (-1)^{\mathrm{S}} \cdot \left(\,\Sigma_{j=0}^{11}\,2^{j-2}\cdot\mathrm{M}_{j} \right) \end{aligned}\]Note that the scale factor’s binary encoding does not need the sign bit, as it is always positive by definition of quantization. Based on the above equations, the dequantized output should be:
\[\mathrm{O_{D}} \,=\, (-1)^{\mathrm{S}} \cdot\, 2^{\mathrm{E_{W}} + \mathrm{E_{A}}-14} \cdot \left[\,1.\mathrm{M_{W}} \cdot 1.\mathrm{M_{A}} \cdot \left(\,\Sigma_{j=0}^{11}\,2^{j-2}\cdot\mathrm{M}_{j}\,\right) \,\right]\]Similar to MX, this expression closely matches the standard floating-point representation. The dequantized output sign is the FP sign, and the FP exponent \(\mathrm{E} = \mathrm{E_{W}} + \mathrm{E_{A}} - 14\) is calculated via unsigned integer addition. However, calculating the dequantized output mantissa is more complicated, which involves a 4-bit multiplication between the two scale factors’ mantissa, followed by multiplying the 12-bit output mantissa. Then, the dequantized output mantissa is normalized to the standard FP mantissa via leading-one detector and shifter. Finally, the three binary components: sign, exponent, mantissa of dequantized output, are concatenated together to produce a FP24-E5M19 number for cross-block partial sum accumulation.
Based on the above analysis, the NV dequantizer differs from the MX dequantizer in two notable aspects: (1) It uses a slightly cheaper adder (4-bit vs. 8-bit) for exponent addition; (2) But it requires much more expensive multiplier (\(4\text{-bit} \times 4\text{-bit} \times 12\text{-bit}\)) for mantissa multiplication. Thus, the GEMM hardware
III-3. Hierarchical Scaling for MXFP4
As discussed in the previous section, NV quantization requires an FP32 tensor scale in addition to the FP8-E4M3 block scale. This multi-level scheme is commonly referred to as hierarchical scaling. The main reason behind NV’s hierarchical scaling is that, the FP8-E4M3 block scale alone may not fully cover a tensor’s dynamic range
Meta's MXFP4 Recipe
At first glance, hierarchical scaling may seem unnecessary for MXFP4, since the E8M0 block scale already covers the tensor’s full dynamic range. However, as discussed in Section III-2, one way to reduce the MX quantization error is to bring the mantissa of block maximum closer to that of quantization maximum through additional mantissa scaling, which requires the scale factor to contain mantissa bits. However, directly adding mantissa bits to the E8M0 block scale introduces significant memory and computation overhead during dequantization.
To enable mantissa scaling for MX without sacrificing hardware efficiency, Meta proposes a two-level Macro Block Scaling (MBS) scheme
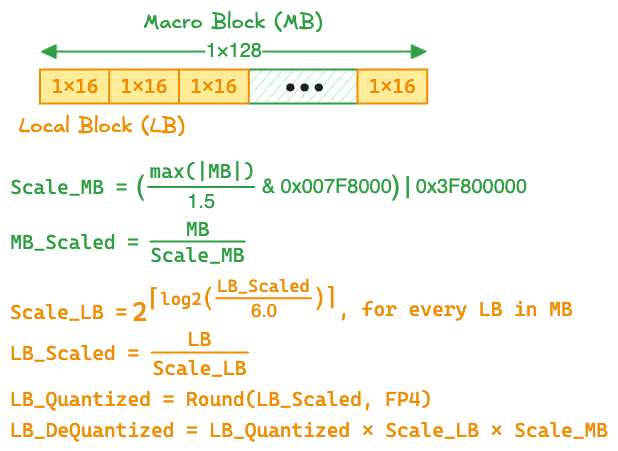
where the E0M8 macro-block scale is obtained by extracting the top 8 mantissa bits of the FP32 scale, i.e., \(\frac{\texttt{max}(\,\mathrm{|MB|}\,)}{1.5} \text{ & 0x007f8000}\).
Why Does MBS Help? Let’s analyze how MBS affects the macro-block maximum, \(\mathrm{B_M}_{\text{max}}\). Assume \(\mathrm{B_M}_{\text{max}}\) is a positive normal FP32 value, leading to the following equations for MBS:
\[\begin{aligned} &\mathrm{B_M}_{\text{max}} = 2^{\mathrm{E'}} \cdot \mathrm{M'} \quad \text{(Assume positive normal value.)} \\[0.1em] &\mathrm{S_{B_M}} = \left(\frac{ \mathrm{B_M}_{\text{max}} }{ 1.5 }\right) = \begin{cases} \; 2^{\mathrm{E'}} \times \left( \frac{\mathrm{M'}}{1.5} \right) & \text{if } \mathrm{M'} \geq 1.5 \\[0.1em] \; 2^{\mathrm{E'}-1} \times \left( \frac{\mathrm{M'}}{1.5} \cdot 2 \right) & \text{if } \mathrm{M'} < 1.5 \end{cases} \\[0.3em] &\text{(Assume retaining the top 8 bits can sufficiently preserve the whole mantissa.)} \\ &\mathrm{S_{B_M}} = \begin{cases} \; \frac{\mathrm{M'}}{1.5} & \text{if } \mathrm{M'} \geq 1.5 \\[0.1em] \; \frac{\mathrm{M'}}{1.5} \cdot 2 & \text{if } \mathrm{M'} < 1.5 \end{cases} \\[0.3em] &\mathrm{B_{M,\,S}} = \frac{\mathrm{B_M}}{\mathrm{S_{B_M}}} = \begin{cases} \; 2^{\mathrm{E'}} \cdot 1.5 & \text{if } \mathrm{M'} \geq 1.5 \\[0.1em] \; 2^{\mathrm{E' - 1}} \cdot 1.5 & \text{if } \mathrm{M'} < 1.5 \end{cases} \\[0.3em] \end{aligned}\]The above analysis assumes that retaining the top 8 mantissa bits is sufficient to preserve the whole mantissa, which is generally true. Empirically, Meta finds that the top 8 mantissa bits can approximate the original FP32 mantissa with \(<0.3\%\) error. After performing MBS, the scaled maximum \(\mathrm{B_{M,\,S}}\) has a mantissa of \(1.5\), which can be accurately quantized to 6.0 during the MXFP4 quantization of local-blocks.
The benefits of MBS is two fold. First, it enables more accurate quantization of the macro-block maximum, thereby preserving the numerical fidelity of many high-magnitude outliers. Second, the \(1 \times 128\) macro-block size significantly reduces the memory
To quantify the algorithmic benefits of MBS, I implement Meta’s MXFP4 quantizer
| Llama-3.1-8B | Llama-3.2-3B | Qwen3-4B | Qwen3-8B | |
|---|---|---|---|---|
| Baseline MXFP4 | 8.69 | 13.58 | 15.69 | 10.66 |
| Meta's MXFP4 | 8.14 | 12.82 | 14.52 | 10.42 |
Hardware Implication of MBS: While Meta claims that MBS does not require any change to the GEMM hardware (tensor core), it still necessitates a careful architecture co-design to balance the throughput between tensor core and vector core. Below is a visualization of the GEMM computation flow using MBS:
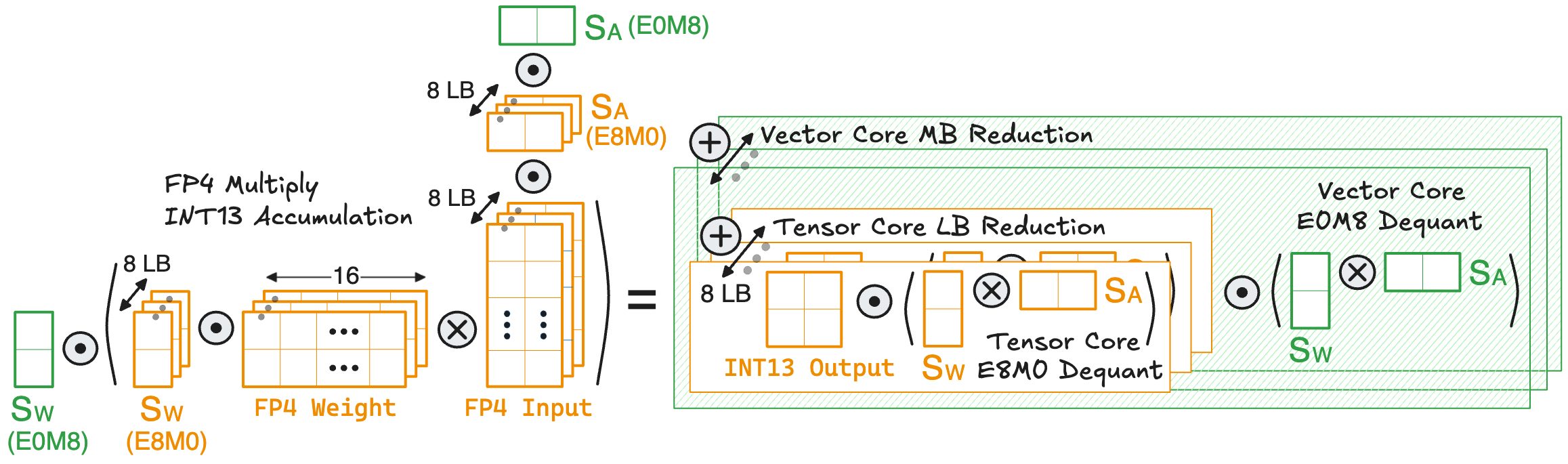
Within a macro-block, the eight local-blocks are all quantized to MXFP4. Therefore, the macro-block dot product, comprising 128 MAC operations, can be accelerated using the dedicated MXFP4 tensor core. However, the macro-block output must be dequantized by multiplying it with two E0M8 scales, followed by accumulation across different macro-blocks. This process is realized on the FP32 vector core and involves 2 MAC operations
DeepSeek's MXFP4 Recipe
The recent DeepSeek-V4
Since each \(1 \times 32\) weight block has its own E8M0 scale, the tensor core can only perform a 32-way FP8 dot product, after which the output must be dequantized on the vector core
To enable a complete \(128 \times 128 \times 1\) FP8 GEMM between weights and activations, all dequantized weight blocks within a \(128 \times 128\) tile should be representable in FP8, which leads to a tile-wise MX scaling as described in the following equations:
\[\begin{aligned} &\text{For every } \mathrm{B} \text{ in } \mathrm{T}: \\[0.3em] &\quad\;\; \mathrm{S}_\text{B} = \frac{ |\mathrm{B}|_{\text{max}} }{ 6 } ; \ \ \mathrm{S_{Q}} = 2^{\left\lceil\,\texttt{log2}\left( \,\mathrm{S}_\text{B} \,\right) \,\right\rceil} ; \ \ \mathrm{B_{S}} = \frac{\mathrm{B}}{\mathrm{S_{Q}}} \quad\quad \text{(Original MXFP4 Scaling)} \\[0.3em] &\quad\;\; \mathrm{B_{Q}} = \texttt{Round}\left(\,\mathrm{B_{S}}\,,\, \text{FP4}\,\right) \quad\;\;\, \text{(Quantized FP4 Block)} \\[0.3em] &\mathrm{S}_\text{T} = \frac{\texttt{max}\left(\,\mathrm{S_{Q}}\,\right)}{64} \quad\quad \text{(E8M0 Tile Scale)} \\[0.3em] &\text{For every } \mathrm{B} \text{ in } \mathrm{T}: \\[0.3em] &\quad\;\; \mathrm{S}_\text{B} = \frac{\mathrm{S_{Q}}}{\mathrm{S}_\text{T}} \quad\quad\quad\,\, \text{(E8M0 Block scale; Store in E4M0)} \\[0.3em] &\quad\;\; \mathrm{B_D} = \mathrm{B_Q} \cdot \mathrm{S_B} \quad\;\; \text{(Dequantized FP8 block for GEMM)} \\[0.3em] &\mathrm{T_D} = \mathrm{B_D} \cdot \mathrm{S_{T}} \quad\quad\;\;\;\; \text{(Dequantized Tile after FP8 GEMM)} \end{aligned}\]where \(\mathrm{T}\) and \(\mathrm{B}\) denote the \(128 \times 128\) weight tile and the \(1 \times 32\) weight block, respectively. \(\mathrm{S}_\text{T}\) and \(\mathrm{S}_\text{B}\) denote the tile scale and block scale, respectively. The subscripts \(_{\text{S}\,}\), \(_{\text{Q}\,}\), and \(_{\text{D}\,}\) represent the scaled, quantized, and dequantized operand, respectively.
There are several important details in the above recipe that are worth discussing:
- When computing the tile scale \(\mathrm{S_{T}}\), where does the magic number \(64\) come from? It is to ensure the block scale \(\mathrm{S_B} \leq 64\) and the dequantized block \(\mathrm{B_D} \leq 6 \times 64 = 384\), which maximizes the utilization of FP8 quantization values
For example, choosing $$\mathrm{S_T} = \frac{\text{max}(\mathrm{S_Q})}{128} \implies \mathrm{B_D} < 768$$which may exceed the maximum FP8 value. Similarly, choosing $$\mathrm{S_T} = \frac{\text{max}(\mathrm{S_Q})}{32} \implies \mathrm{B_D} ≤ 192$$which can waste many FP8 quantization values. You may want to use some example tensors and try this out in Pytorch for better visualization. . - When computing the block scale \(\mathrm{S_{B}}\), I leave a note saying that it can be stored in E4M0, which has a power-of-two range \([\,2^{-6}, 2^8\,]\). This allows the dequantized block \(\mathrm{B_D} = \mathrm{B_Q} \cdot \mathrm{S_{B}}\) to be perfectly represented in FP8-E4M3 without overflow and underflow. But does E4M0 introduce extra error compared to the original E8M0 block scale? As discussed in the previous point, \(\mathrm{S_B} \leq 64 = 2^6\) already falls within the upper bound of E4M0. The remaining concern is whether the smallest block scale is guaranteed to be larger than \(2^{-6}\). Empirically, DeepSeek finds that their model weights satisfy this condition
I believe this condition holds for most LLMs. In general, prior work has observed that LLM weights tend to exhibit a small dynamic range, meaning their binary exponents have small difference and can be encoded with fewer bits. .
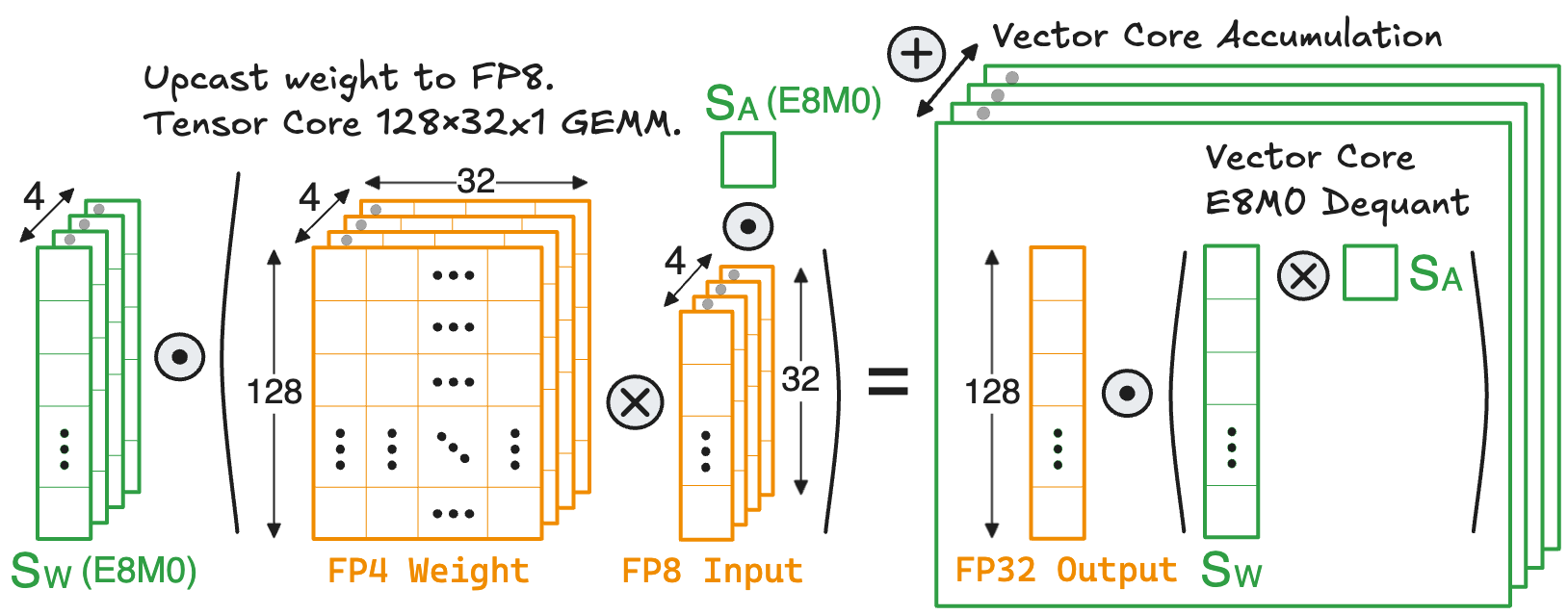
Hardware Implication: With DeepSeek’s hierarchical MXFP4 scaling, the \(128 \times 128 \times 1\) mixed-precision GEMM flow becomes:
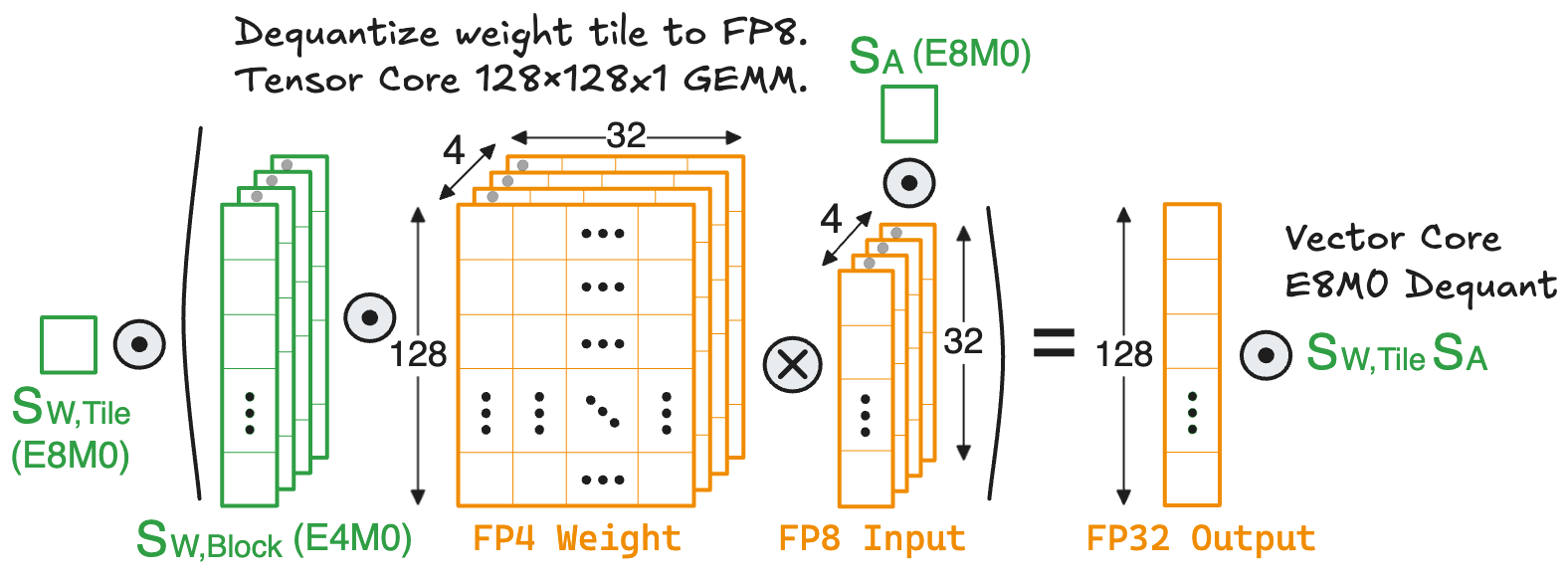
Now, the entire \(128 \times 128\) weight tile can be first dequantized to FP8, where each \(1 \times 32\) weight block is multiplied by its E4M0 block scale. Then a \(128 \times 128 \times 1\) FP8 GEMM is performed on the tensor core. Finally, the GEMM output is dequantized on the vector core by multiplying it with the two scales of weight tile and activation block.
Let’s analyze the computation cost of dequantization before and after applying DeepSeek’s hierarchical scaling. In the naive GEMM with single-level MXFP4 scaling, the vector core performs 1024 multiplications
Acknowledgment
- Special thanks to Xilai Dai (Cornell University), Dr. Chao Fang (KU Leuven), and Prof. Mohamed Abdelfattah (Cornell University), for helping shape out the content of this blog.
- For readers with a broad interest in Machine Learning Hardware and Systems, my advisor Mohamed Abdelfattah has a nice lecture series available on his website and Youtube.
- I decided to write this blog partly because I stumbled over Simon Boehm’s amazing blog about CUDA Matmul kernel optimization.
- Drawings are largely made with Excalidraw.